 従来は、人が手を動かして、完成した製品を丁寧に検査し、品質が適切かどうかを判断していました。このような検査は、時間がかかるだけでなく、毎日、何時間も繰り返されるため、精神的にも疲弊してしまいます。
従来は、人が手を動かして、完成した製品を丁寧に検査し、品質が適切かどうかを判断していました。このような検査は、時間がかかるだけでなく、毎日、何時間も繰り返されるため、精神的にも疲弊してしまいます。
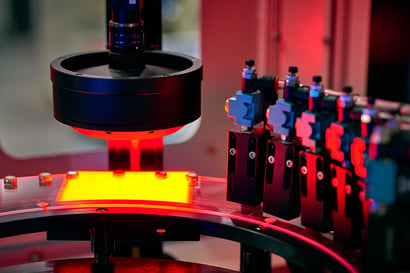
スループットを向上させるには、外観検査技術の自動化が必要です。理想は、生産ラインを流れる製品を各工程で検査することです。工程の早い段階で不良品を排除することで、コストを削減し、作り直しを減らし、エラーの蓄積を防ぐことができます。高解像度のビデオを使うことで、僅かな異常や欠陥を見つけることができます。
生産性の最大化とは、AIによる外観検査を生産ペースに合わせて実行し、品物が現れた時に短時間で判断することです。AIは人間のように疲れることなく、シフトの最初でも最後でも同じように的確な判断を下します。
 ロボットのプログラミングは芸術のようなものです。従来型の6DoFの産業用オートメーションロボットは、独自のプログラミング言語と構文を持っています。また、破損や損傷を防ぐための動作の安全性については、多くのルールが存在します。
ロボットのプログラミングは芸術のようなものです。従来型の6DoFの産業用オートメーションロボットは、独自のプログラミング言語と構文を持っています。また、破損や損傷を防ぐための動作の安全性については、多くのルールが存在します。
プログラミングには、多くの試行錯誤が必要です。コンフィギュレーションを成功させるには、プロセスの流れと、ロボットの操作能力の両方を理解することが必要です。ロボットプログラミングは、プログラマーが予期せぬ事態を想定し、それをコード化する能力があって始めて成り立ちます。
最近、勢いを増しているテクノロジーに、ロボットの動作を人間が実演しながら学習させる「human-guided 学習」があります。また、GAN(敵対的生成ネットワーク)などの「教師なし学習」も注目されています。これらの技術は、ロボットを高速化するのに必要な時間や労力を削減することに重点を置いています。
 現代の製造環境においては、一般的にロボットが単独で働くことはありません。複数のロボットが一連の作業に従事し、時には複数のロボットが連携して1つの工程をこなすこともあります。また、自動倉庫のように、原材料の調達や生産ラインへの搬送にロボットが関わることもあります。
現代の製造環境においては、一般的にロボットが単独で働くことはありません。複数のロボットが一連の作業に従事し、時には複数のロボットが連携して1つの工程をこなすこともあります。また、自動倉庫のように、原材料の調達や生産ラインへの搬送にロボットが関わることもあります。
ロボットがどのように移動経路を選択するかによって、スループットと効率に大きな差が生まれます。これは、自動運転車に要求されるものと似ていますが、閉じた回路でより制御された条件下で移動することが求められます。ロボットは、スタート地点から目的地までの地図を理解し、衝突を避けながらうまく進む必要があります。
AI推論は、物体の感知や動作判断に必要な知覚・予測・計画段階を可能にし、最も効率の良い経路を学習することができます。