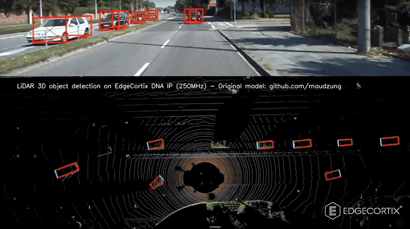
 ライダーは、3D空間にレーザー光を高速で照射させることで物体を計測します。出力は、光が当たった物体までの距離を示す3次元点群で表します。点群データをより詳細に取得できるという利点はありますが、車両や周囲の物体が動くと解析が難しくなります。
ライダーは、3D空間にレーザー光を高速で照射させることで物体を計測します。出力は、光が当たった物体までの距離を示す3次元点群で表します。点群データをより詳細に取得できるという利点はありますが、車両や周囲の物体が動くと解析が難しくなります。
高度なモデリングにより、他の車両が横に並んだり、死角に入ったり、車線から外れたりしたときの判断など、スキャンごとに違いを見つけることができます。ライダーは、橋や立体駐車場などの高さも感知できるため、車高の高い車には欠かせない機能となるという、もう一つ利点があります。
これらの点群から様々な情報を得ることができるため、AI推論に関する研究の多くにおいては、点群の分析に焦点を当てています。オープンセット・セマンティックセグメンテーションのようなAI推論技術は、非構造化LiDARデータの取得に役立つでしょう。
 カメラは、人間の視覚を再現することに優れています。フレーム数やピクセル解像度を上げることで、より高品質な画像を得ることができます。しかし、フレーム数やピクセル数の増加は、処理量の増加に繋がるという課題があります。
カメラは、人間の視覚を再現することに優れています。フレーム数やピクセル解像度を上げることで、より高品質な画像を得ることができます。しかし、フレーム数やピクセル数の増加は、処理量の増加に繋がるという課題があります。
詳細な情報を得ることで、遠くの物体をより早く発見することができます。特に高速道路を走行する大型トラックは、操縦や停止に距離を必要とするため、これにより、十分な時間を確保できるようになります。正確な検出を行うには、画像内のすべてのピクセルにラベルを付けてセマンティックセグメンテーションを行う必要があります。
AIは、カメラのみの自動運転車システムが正しく感知するために重要な、リアルタイムの奥行き推定などの機能をカメラに搭載することができます。また、AttentionベースのAIモデルは、カメラ画像内の物体検出を向上できる可能性があります。
 AI推論で自動車をよりスマートにすることは、道路をより安全で効率的にするために必要な改革の一部に過ぎません。もう一つの取り組みは、インテリジェント・トランスポーテーションで道路上でリアルタイムにデータを収集し、ドライバーを補助する機能を追加することです。
AI推論で自動車をよりスマートにすることは、道路をより安全で効率的にするために必要な改革の一部に過ぎません。もう一つの取り組みは、インテリジェント・トランスポーテーションで道路上でリアルタイムにデータを収集し、ドライバーを補助する機能を追加することです。
車両数の集計は以前から行われていましたが、現在ではカメラやその他のセンサーからより多くの情報を収集することができます。車種はもちろん、歩行者や自転車も特定することができ、車間距離の把握や車線変更も容易に行えます。また、緊急車両への通知や誘導も可能です。
また、V2X(Vehicle-to-Everything)システムも重要な役割を果たします。V2Xは、車両の速度や車間距離の制御に役立ちます。インテリジェント・トランスポーテーションは、最終的には道路上の交通をライトレール(軽量軌道交通)やエアタクシーなどの他のモダリティと連携させる可能性もあります。